
ژاکتی که به رباتها حس لامسه میدهد!
به گزارش ایسنا و به نقل از نیواطلس، موسسه رباتیک دانشگاه کارنگی ملون از منسوجات بافتنی ماشینی یک پوست ساخته است که میتواند تماس و فشار را تشخیص دهد.
بدین ترتیب، این ربات ژاکتپوش میتواند بلافاصله پس از تماس تصادفی با یک کارگر مجاور، حرکت خود را متوقف کند.
بسیاری از رباتهای صنعتی برای اینکه به طور تصادفی به کارگران انسان آسیب نرسانند، حسگرهایی دارند که تماس فیزیکی با افراد یا اشیاء دیگر را تشخیص میدهند. دانشمندان اکنون ژاکتی با فناوری پیشرفته ابداع کردهاند که این قابلیت را برای رباتها به ارمغان میآورد.
این فناوری که به عنوان RobotSweater شناخته میشود، توسط گروهی از پژوهشگران دانشگاه کارنگی ملون به رهبری جیمز مککان و چانگلیو لیو توسعه داده شده است.
این پارچه مخصوص که دور یک بازوی رباتیک و به منبع برق متصل است، از سه لایه مواد روی هم تشکیل شده است.
لایههای بالایی و پایینی از نخ نایلونی معمولی تشکیل شدهاند که نوارهایی از یک نخ رسانای الیاف فلزی با فاصله از آنها عبور میکند. این نوارها در یک لایه به صورت ردیفی(تار) و در لایه دیگر به شکل ستون(پود) قرار گرفتهاند، بنابراین وقتی از بالا به آن نگاه میکنیم یک شبکه را تشکیل میدهند. بین این دو لایه نیز یک لایه عایق از بافت غیر رسانا قرار گرفته است.
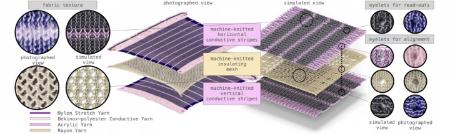
تا زمانی که هیچ فشار خارجی به ربات ژاکتپوش وارد نشود، دو لایه نوار رسانا از یکدیگر جدا هستند و هنگامی که فشار اعمال میشود، برخی از نوارهای روی آن لایهها از طریق سوراخهای لایه بافت غیررسانا به یکدیگر متصل میشوند.
این کار، یک مدار را تشکیل میدهد و یک سیگنال الکتریکی تولید میکند. سپس با تجزیه و تحلیل جایی که این سیگنال در شبکه نوار رسانا منشأ گرفته، میتوان تعیین کرد که در چه قسمتی فشار روی ژاکت اعمال شده است.
در یک سناریو در دنیای واقعی، ربات میتواند با توقف فوری حرکت، واکنش نشان دهد. این فناوری همچنین میتواند به افراد اجازه دهد تا رباتها را برای انجام اعمال خاصی مرتبط با لمس کردن و هدایت فیزیکی آنها آموزش دهند.
علاوه بر این، پژوهشگران هم اکنون در حال بررسی امکان استفاده از دستورات کشیدن انگشت و نیشگون گرفتن روی ژاکت، به گونهای که گویی یک صفحه نمایش لمسی است، هستند.
همچنین به عنوان یک مزیت اضافی، چون RobotSweater از مواد نرم و انعطافپذیر ساخته شده است، میتوان آن را روی قسمتهایی با شکل غیر یکنواخت یا متحرک در رباتهایی که نمیتوانند حسگرهای سفت و سخت معمولی را در خود جای دهند، استفاده کرد.


