ربات کوچکی که رکورد سوسکهای واقعی را در سرعت شکست
به گزارش ایسنا به نقل از آیای، این ربات به طور موثری از حرکت رو به جلو و به حرکت رو به عقب با تراز کردن حرکات ارتعاشی آهنربا، کنسول و اتصالات خود تغییر حالت میدهد.
تیم دانشگاه بیهانگ ادعا میکند که این دستگاه یک باتری، یک مدار کنترل برای عملکرد بیسیم و دو محرک الکترومغناطیسی برای ظرفیت بار بالا دارد.
به گفته محققان، BHMbot-B به ترتیب با سرعتهای 360 میلیمتر بر ثانیه و 338 میلی متر بر ثانیه به جلو و عقب حرکت میکند و توانایی خود را در مانور دادن در محیطهای چالش برانگیز با دقت و چابکی نشان میدهد.
تحرک پیشرفته
ماشینهای بزرگ برای حرکت در فضاهای محدود برای کارهایی مانند بازرسی یا رفع گرفتگی بدون خطر آسیب ساختاری تلاش میکنند. میکرورباتها به عنوان یک راه حل ظاهر شدهاند و سرعتهای بالا و چرخش دقیق را ارائه میدهند.
با این حال، در تونلهای تنگ که چرخش غیرممکن است، در صورت مواجهه با بنبست با چالشهایی مواجه میشوند. بر خلاف حشراتی که به طور غریزی در صورت مسدود شدن مسیر عقب میروند، اکثر میکرورباتها توانایی حرکت موثر رو به عقب را ندارند، که این مهارتی حیاتی برای حرکت در محیطهای ناشناخته و باریک است.
طرحهای قبلی، مانند ربات HAMR، حرکت رو به جلو و عقب را با استفاده از چند محرک نشان میدادند، اما چنین سیستمهایی پیچیده هستند و کوچکسازی آنها برای عملیاتهای بیسیم دشوار است.
به گفته محققان، حرکت رو به عقب را میتوان با تنظیم دستی ساختارهای میکروربات، مانند چرخاندن پاها یا چرخاندن بدن، فعال کرد. با این حال، کنترل از راه دور عملی نیست. یکی از بزرگترین چالشها هنوز یافتن راهحلهای فشرده و مؤثر برای تغییر جهت در لحظه است.
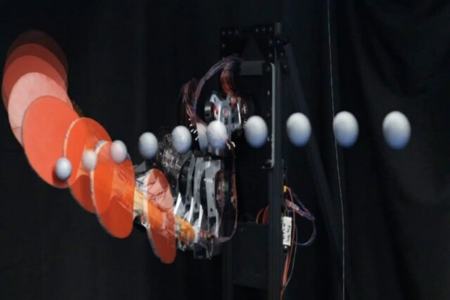
حشرات هنگام مواجهه با موانع در فضاهای تنگ به طور غریزی عقبنشینی میکنند، رفتاری که توسط BHMbot-B که برای حرکت به جلو و عقب بدون چرخش طراحی شده، شبیهسازی شده است.
این ربات کوچک با استفاده از یک محرک الکترومغناطیسی، کنسول و سیستم اتصال چهار میلهای کار میکند. هنگامی که جریان متناوب به سیم پیچ اعمال میشود، کنسول حرکت میکند، که باعث نوسان آهنربا میشود. ربات ممکن است با چرخاندن پاهای جلویی خود در جهات مختلف به جلو یا عقب حرکت کند.
هنگامی که کنسول و آهنربا در یک جهت حرکت میکنند، با برخورد پاهای جلویی به زمین، نیروی اصطکاک رو به جلو ایجاد میشود که باعث حرکت رو به جلو میشود. برعکس، در حالت دوم، آهنربا و کنسول برعکس حرکت میکنند و باعث میشوند پاهای جلویی برای مدت کوتاهی از موقعیت تعادلی خود فراتر رفته و اصطکاک رو به عقب ایجاد کنند.
این تیم تاکید کردند که پاهای عقب ربات با غلتکهای ریز طراحی شدهاند تا اصطکاک را به حداقل برسانند و قابلیت تحمل بار را برای عملیات بیسیم افزایش دهند. این ربات میتواند بارها را تا 32 برابر وزن خود حمل کند.
میکروربات BHMbot-B در سطوحی مانند شیشه، ماسه و لولههای سازگار بوده است.
تحقیقات آتی بر روی افزودن حسگر محیطی و ناوبری مستقل تمرکز خواهند کرد و کاربرد این ربات را در محیطهای چالش برانگیز افزایش میدهند.