این ربات بندبازی میکند!
به گزارش ایسنا به نقل از آیای، گروهی از پژوهشگران موسسه رباتیک دانشگاه کارنگی ملون روشی را ابداع کردهاند که به یک ربات چهارپا اجازه میدهد روی یک میله باریک با حفظ تعادل راه برود.
راه حل آنها شامل اجرای یک سیستم واکنش چرخ فعال(RWA) است که در پشت ربات چهارپا نصب شده است. این سیستم از طریق یک تکنیک کنترل جدید، ربات را قادر میسازد بدون توجه به موقعیت پاهای خود، به طور مستقل تعادل خود را حفظ کند.
پژوهشگران برای افزایش قابلیت تعادل این ربات از سخت افزاری استفاده کردند که معمولاً برای کنترل ماهوارهها در فضا استفاده میشود.
با بهبود قابلیتهای تعادلی و تثبیتکننده این ربات چهارپا میتوان آن را به محصولی تجاری تبدیل کرد، مشابه با آنچه بر سر پهپادها در حدود یک دهه پیش گذشت.
به نظر میرسد اتفاق بزرگ بعدی در رباتیک، رباتهای چهارپا هستند. گروه سازنده این ربات پیشبینی میکند که از آنها به زودی به عنوان ابزارهای تحقیقاتی در آزمایشگاهها استفاده میشود و به محصولاتی پرکاربرد در این زمینه تبدیل میشوند.
تواناییهای گربه مانند این ربات
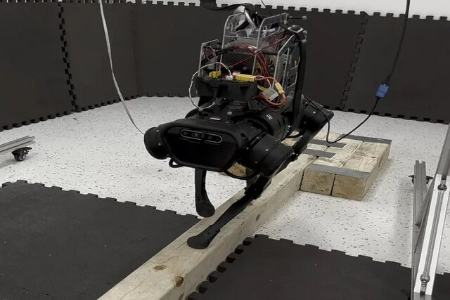
این پژوهش جدید با استفاده از یک ربات موسوم به Unitree A1 انجام شد که دو RWA به محور آن متصل بود. توانایی این ربات برای حفظ تعادل با راه رفتن روی یک میله باریک تعادلی به عرض 6 سانتیمتر آزمایش شد که بدون افتادن از روی آن موفق به انجام آن شد.
علاوه بر این، پژوهشگران مشکل سقوط ربات را با انداختن آن از ارتفاع تقریباً نیم متری در حالی که وارونه بود، شبیهسازی کردند و RWAها به ربات اجازه دادند تا خود را در هوا بچرخاند و روی پاهایش فرود بیاید.
مقاله پژوهشی این گروه با عنوان «تعادل تقویت شده برای رباتهای پادار با استفاده از چرخهای واکنشی» برای ارائه در کنفرانس بینالمللی رباتیک و اتوماسیون 2023 که از 29 مه تا 2 ژوئن در لندن برگزار میشود، تایید شده است.
سیستم RWA تعادل رباتها را بهبود میبخشد
عناصر استاندارد در رباتهای چهارپای مدرن بیشتر شامل نیم تنه و چهار پای جداگانه است که هر کدام به یک انتهای گِرد ختم میشوند و به ربات اجازه میدهند از سطوح ساده و صاف عبور کند و حتی از پلهها بالا برود. با این حال، رباتهای چهارپا مانند حیوانات چهارپا دارای چابکی غریزی نیستند و اگر فقط یک یا دو پای آنها روی زمین باشد، ربات نمیتواند به راحتی اختلالات را مدیریت کند و خطر سقوط بسیار بالایی آن را تهدید میکند.
پژوهشگران برای رفع این مشکل از یک سیستم فعال چرخ واکنشی(RWA) استفاده کردهاند که در پشت یک ربات چهارپا نصب میشود و با کمک یک تکنیک کنترل جدید به ربات اجازه میدهد تا مستقل از موقعیت پاهای خود تعادل برقرار کند.
RWAها به طور گسترده در صنعت هوافضا برای کنترل ماهوارهها و دستکاری حرکت زاویهای فضاپیماها استفاده میشوند.
این گروه پژوهشی نمونه اولیه خود را با نصب دو RWA بر روی یک ربات تجاری به نام Unitree A1 ساخت که کنترل حرکت زاویهای ربات را فراهم میکرد. گفتنی است که سختافزار ربات را میتوان مدلسازی کرد و در یک الگوریتم کنترل پیشبینی مدل استاندارد ادغام کرد.
این گروه، سیستم خود را با یک مجموعه آزمایشهای موفق سنجیدند که توانایی افزایش یافته ربات را برای بازیابی از ضربههای ناگهانی نشان داد.
پژوهشگران میگویند با ادامه کار روی تقویت قابلیتهای تثبیت کننده یک ربات چهارپا برای مطابقت با حیوانات چهارپا که این ربات ها از آنها الهام گرفته شدهاند، میتوان از آنها در سناریوهای پرمخاطره مانند عملیاتهای جستجو و نجات در آینده استفاده کرد.


